ROS (Robot Operating System) es un proyecto de código abierto que proporciona un marco y herramientas para aplicaciones de robótica. Ayuda a diseñar software complejo sin saber cómo funciona cierto hardware.
Noético es una versión LTS de ROS y adaptada para Ubuntu 20.04. El soporte de ROS Noetic es hasta 2025 (5 años). Las arquitecturas admitidas son amd64, armhf y arm64.
En este tutorial, veremos cómo instalar ROS Noetic en Ubuntu 20.04 .
1. Agregue el repositorio oficial de Noetic a Ubuntu
El primer paso para instalar ROS Noetic es agregar el repositorio oficial de ROS Noetic al archivo de lista de fuentes de Ubuntu 20.04.
Para agregar el repositorio de Noetic, escriba:
$ echo "deb http://packages.ros.org/ros/ubuntu focal main" | sudo tee /etc/apt/sources.list.d/ros-focal.listSalida:
deb http://packages.ros.org/ros/ubuntu focal main.2. Agregar llavero oficial de ROS
A continuación, agregue el llavero oficial de ROS a su sistema Ubuntu 20.04. Hay dos formas de hacerlo.
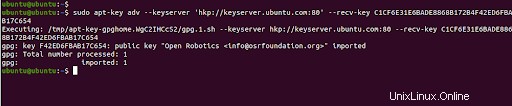
El primer método es usar hkp://keyserver.ubuntu.com:80 Servidor de claves Ubuntu. Si esto no funciona, puede intentar reemplazarlo con hkp://pgp.mit.edu:80 . Por lo tanto, ejecute el siguiente comando.
$ sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
El segundo método es usar el comando curl para descargar el llavero oficial de ROS y agregarlo localmente.
$ curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -La salida "OK", significa que la clave se ha agregado con éxito.
3. Actualizar el índice de paquetes de ROS
A continuación, actualizaremos nuestro sistema Ubuntu para obtener la información del paquete ROS Noetic del repositorio.
$ sudo apt updateEsto sincronizará el repositorio recién agregado con los repositorios en línea de Ubuntu.
4. Instale ROS Noetic en Ubuntu 20.04
ROS tiene varios metapaquetes que puede elegir instalar según sus necesidades específicas.
Los siguientes son los metapaquetes oficiales de ROS Noetic:
- ros-noetic-desktop-full
- ros-noetic-desktop
- ros-noetic-ros-base
- Ros-noetic-ros-core
Elija su metapaquete preferido e instálelo con cualquiera de los siguientes comandos.
Instalar ros-noetic-desktop-full
El paquete ros-noetic-desktop-full incluye todos los paquetes de ros-noetic-desktop y también los paquetes de percepción (ros-noetic-perception) y simulación (ros-noetic-simulators).
Para instalar ros-noetic-desktop-full, ejecute el siguiente comando:
$ sudo apt install ros-noetic-desktop-fullDespués de ejecutar el comando, presione Y para continuar con la instalación.
Instalar ros-noetic-desktop
Ros-noetic-desktop es una versión mínima de ros-noetic-desktop-full. Contiene la mayoría de los paquetes de tutoriales, incluidos:
- vis
- ángulos
- tutoriales_comunes
- tutoriales_de_geometría
- ros_tutoriales
- Roslint
- urdf_tutorial
- tutoriales_de_visualización
Para instalar ros-noetic-desktop, ejecute el siguiente comando:
$ sudo apt install ros-noetic-desktopInstalar ros-noetic-base
La base ros-noetic contiene solo paquetes básicos. Incluye los paquetes en ros_core y otras herramientas básicas que no son robóticas, como reconfiguración dinámica, nodelets y actionlib.
Para instalar ros-noetic-base, ejecute el siguiente comando:
$ sudo apt install ros-noetic-baseInstalar ros-noetic-core
El ros-noetic-core contiene una colección de los paquetes mínimos básicos. Los paquetes incluyen:
- mensajes_comunes
- gencpp
- género
- genlisp
- genmsg
- gennodejs
- Genpy
- generación_mensaje
- mensaje_tiempo de ejecución
- pluginlib
- ros
- ros_comm
- regla_migración_rosbag
- rosconsola
Para instalar ros-noetic-core, ejecute el siguiente comando:
$ sudo apt install ros-noetic-core5. Configurar el entorno ROS Noetic
El siguiente paso es configurar el entorno ROS Noetic. Primero busque el script setup.bash en cada terminal bash que use ROS, escriba:
$ source /opt/ros/noetic/setup.bashAgregue el archivo .bashrc ubicado en su directorio de inicio para evitar que se ejecute cada vez que inicie un nuevo shell:
$ echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrcVerifique ejecutando el siguiente comando:
$ tail ~/.bashrc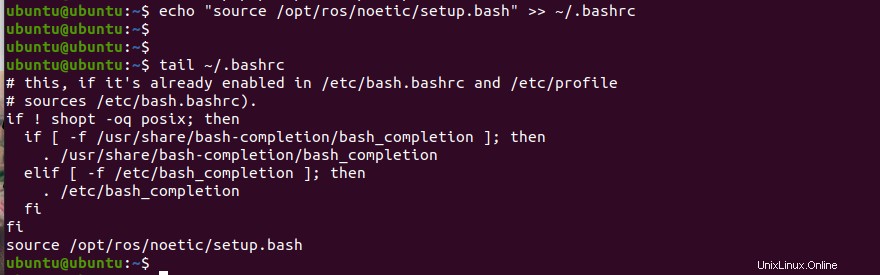
Para que los cambios surtan efecto, escriba:
$ source ~/.bashrc Verificar la instalación de Noetic
Después de instalar con éxito ROS Noetic en Ubuntu 20.04, simplemente ejecute el comando roscd.
$ roscdNotará que el directorio actual de su mensaje cambia a /opt/ros/noetic , que es donde instalamos Noetic.

También podemos verificar la instalación ejecutando roscore comando en el directorio noetic. El resultado muestra la distribución de ros y la versión de ros en el resumen.
$ roscore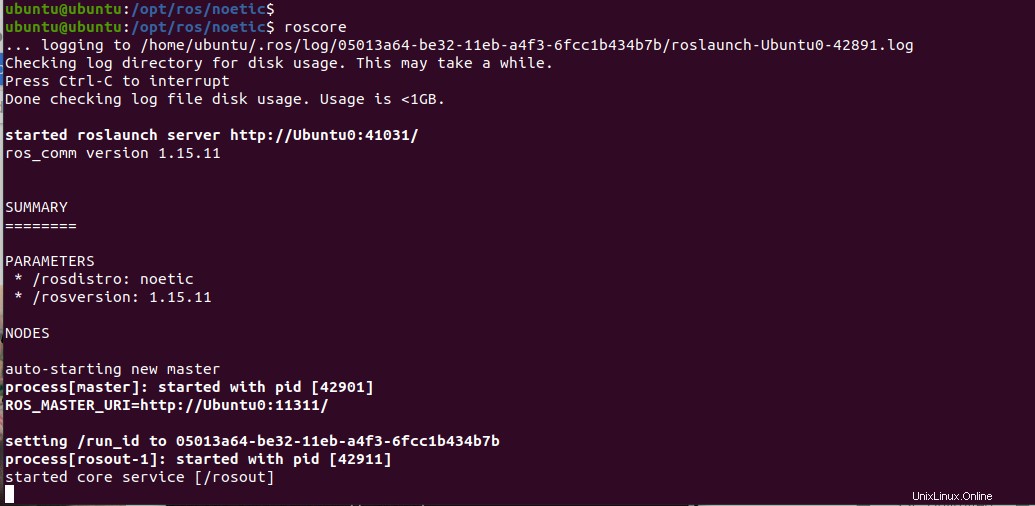
Conclusión
En este tutorial aprendimos a instalar ROS Noetic en Ubuntu 20.04. Ahora puedes programar tus robots usando Noetic.